Master Thesis
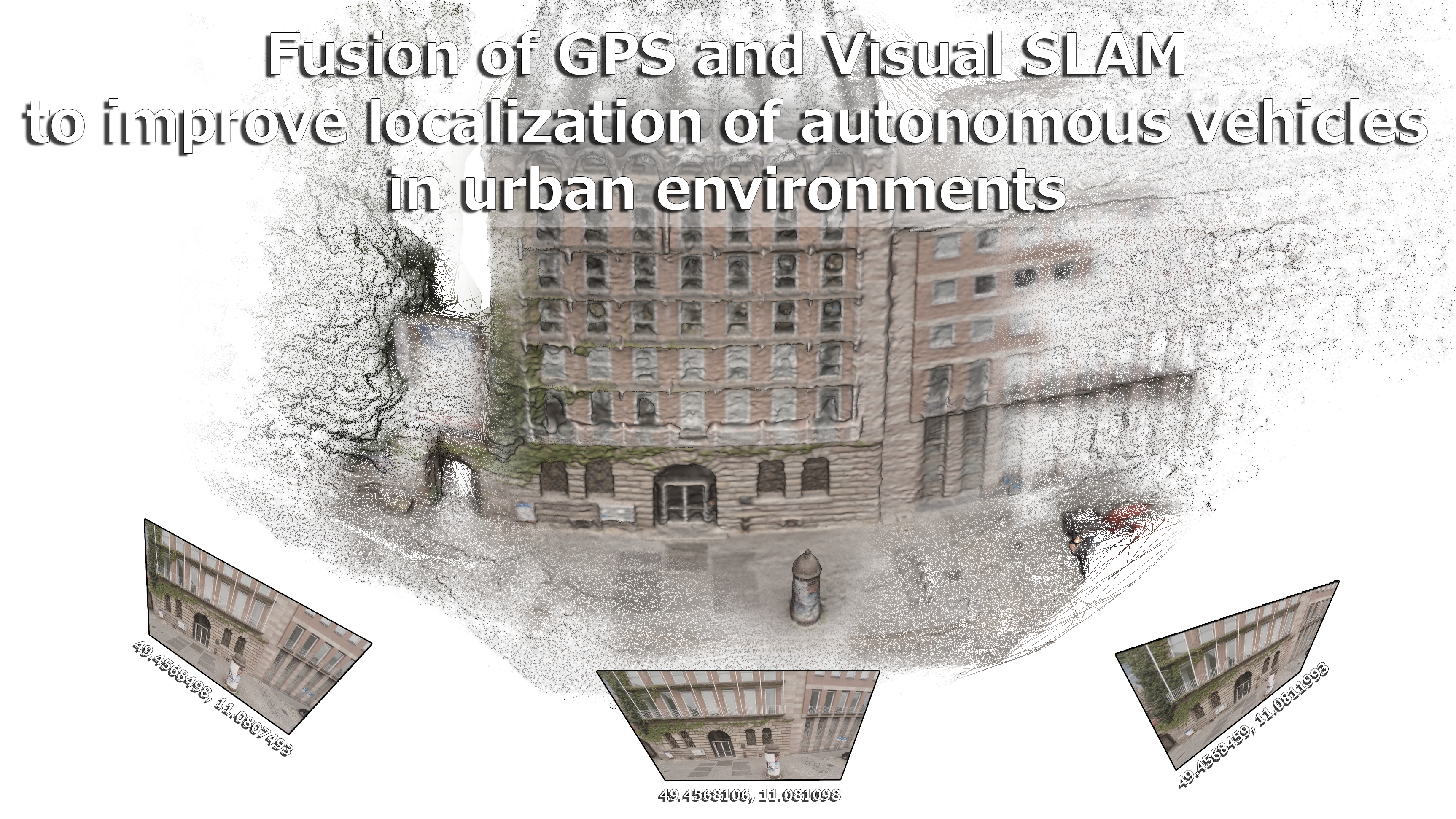
Fusion of GPS and Visual SLAM
to improve localization of autonomous vehicles
in urban environments.
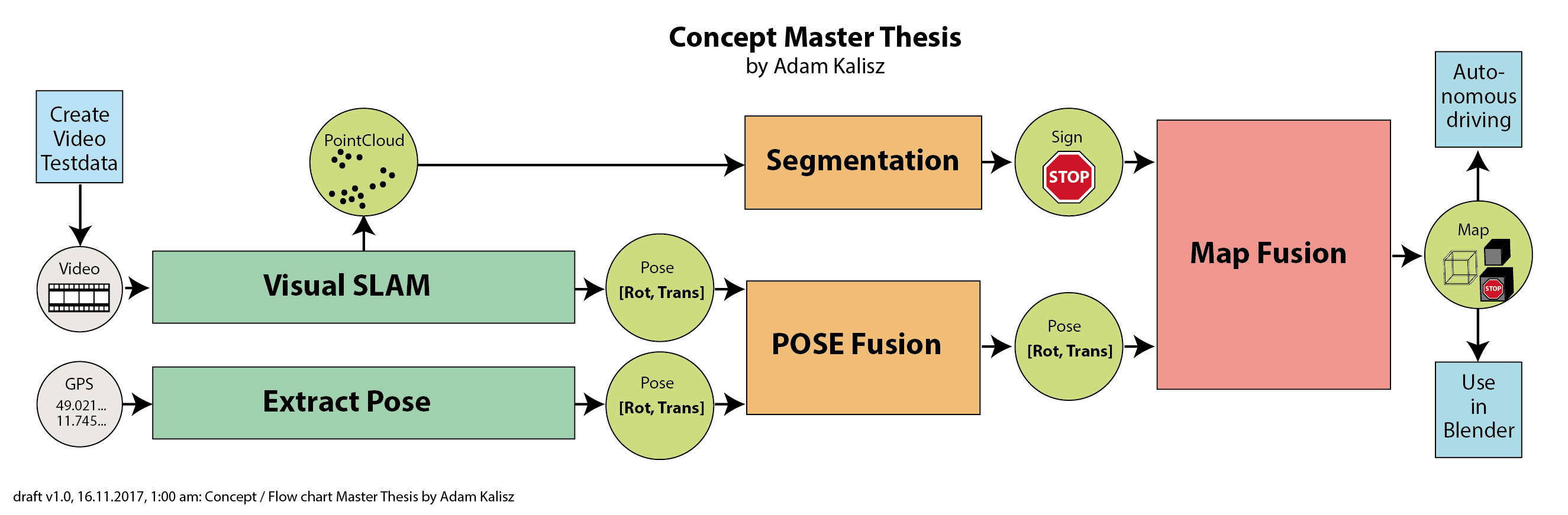
by Adam Kalisz
Online Documentation: https://Master.Kalisz.co
Agenda
- Last time (Recap)
- This time
- Comparison of various VSLAM Algorithms
- Papers on VSLAM and GPS Fusion
- Interesting 3D Reconstruction ideas
- Results!
- Conclusion / Feeling
Last time
Bad GPS accuracy
Bad Visual SfM result - too sparse
Bad impression of ZED Depth
This time
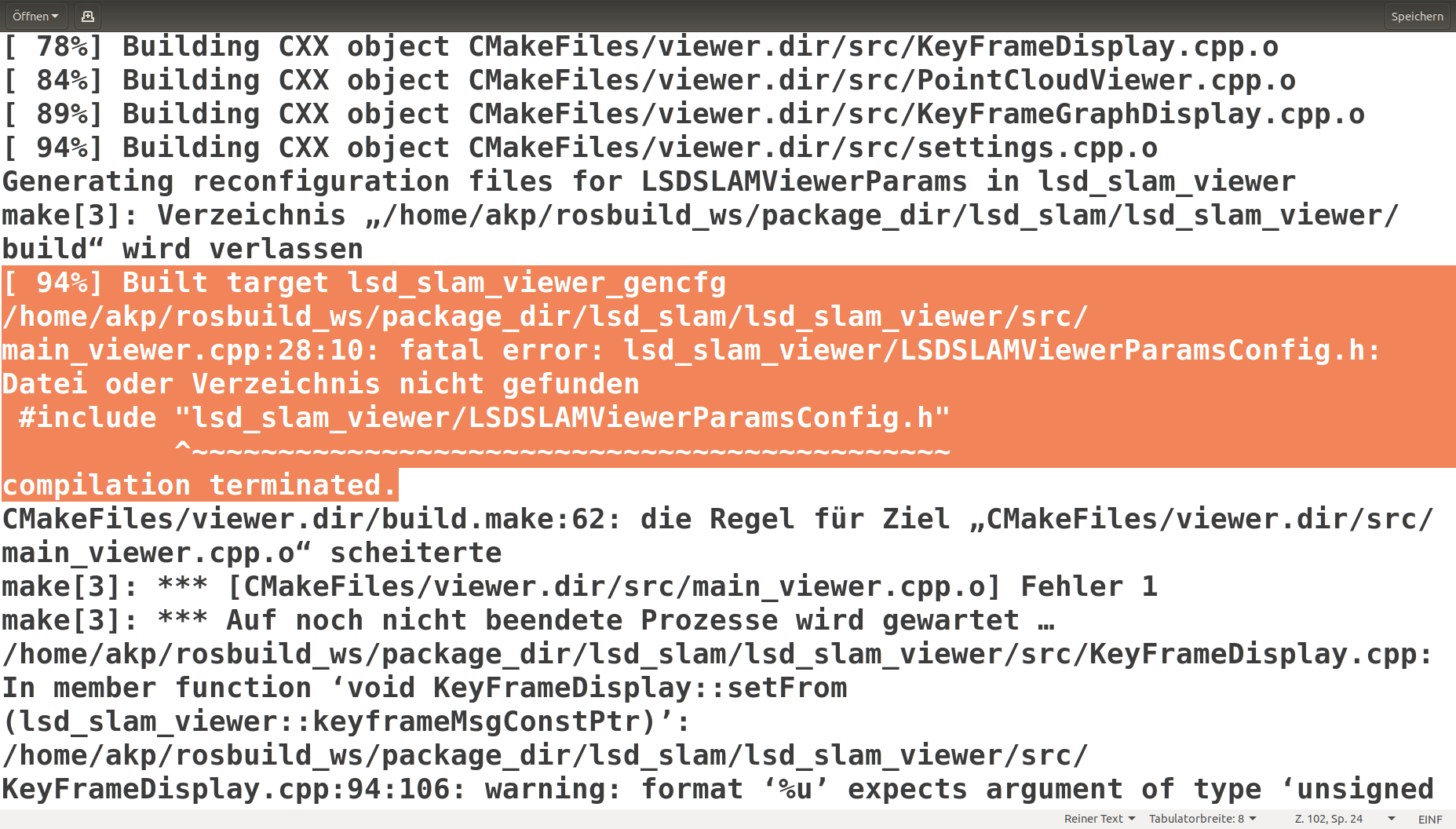
Demo: LSD SLAM
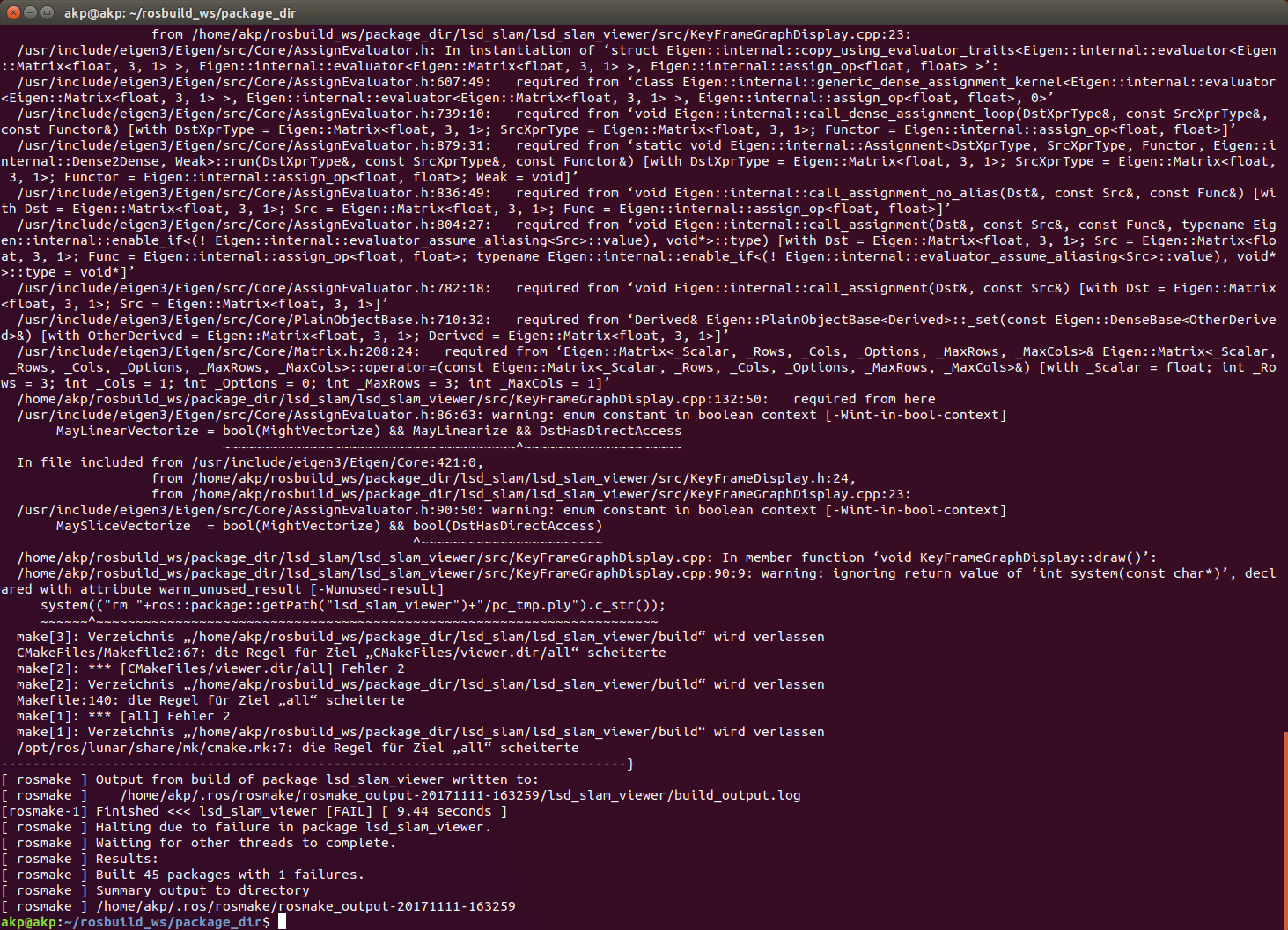
Demo: DSO
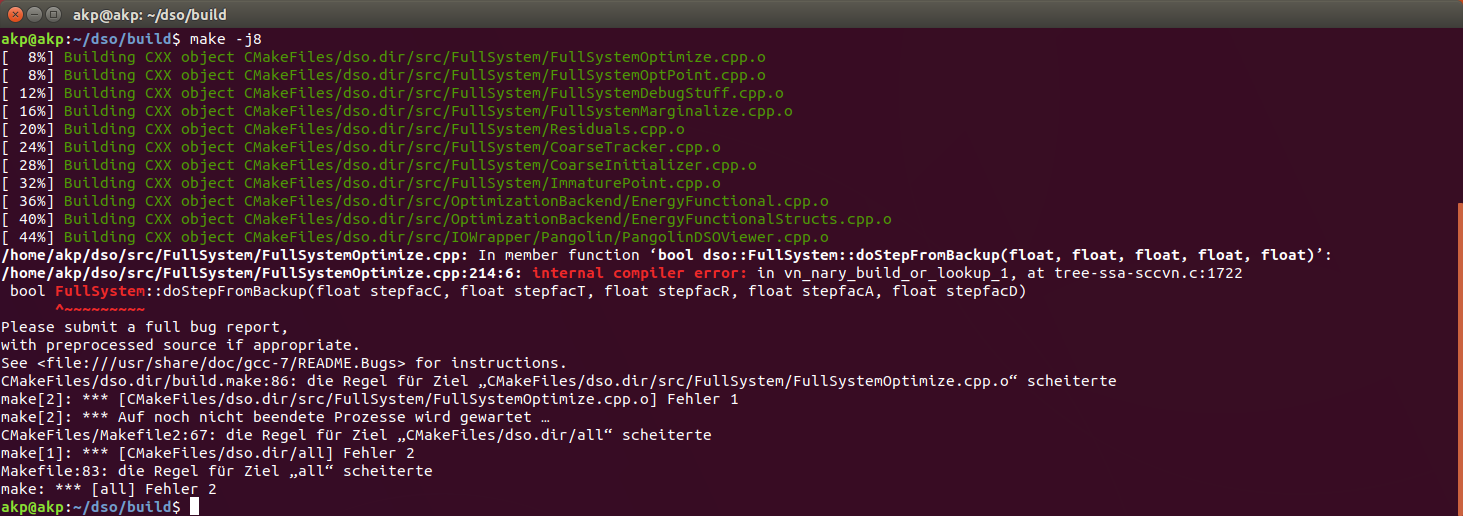
Submitted bug report:
https://gcc.gnu.org/bugzilla/show_bug.cgi?id=82985
Fixed now!
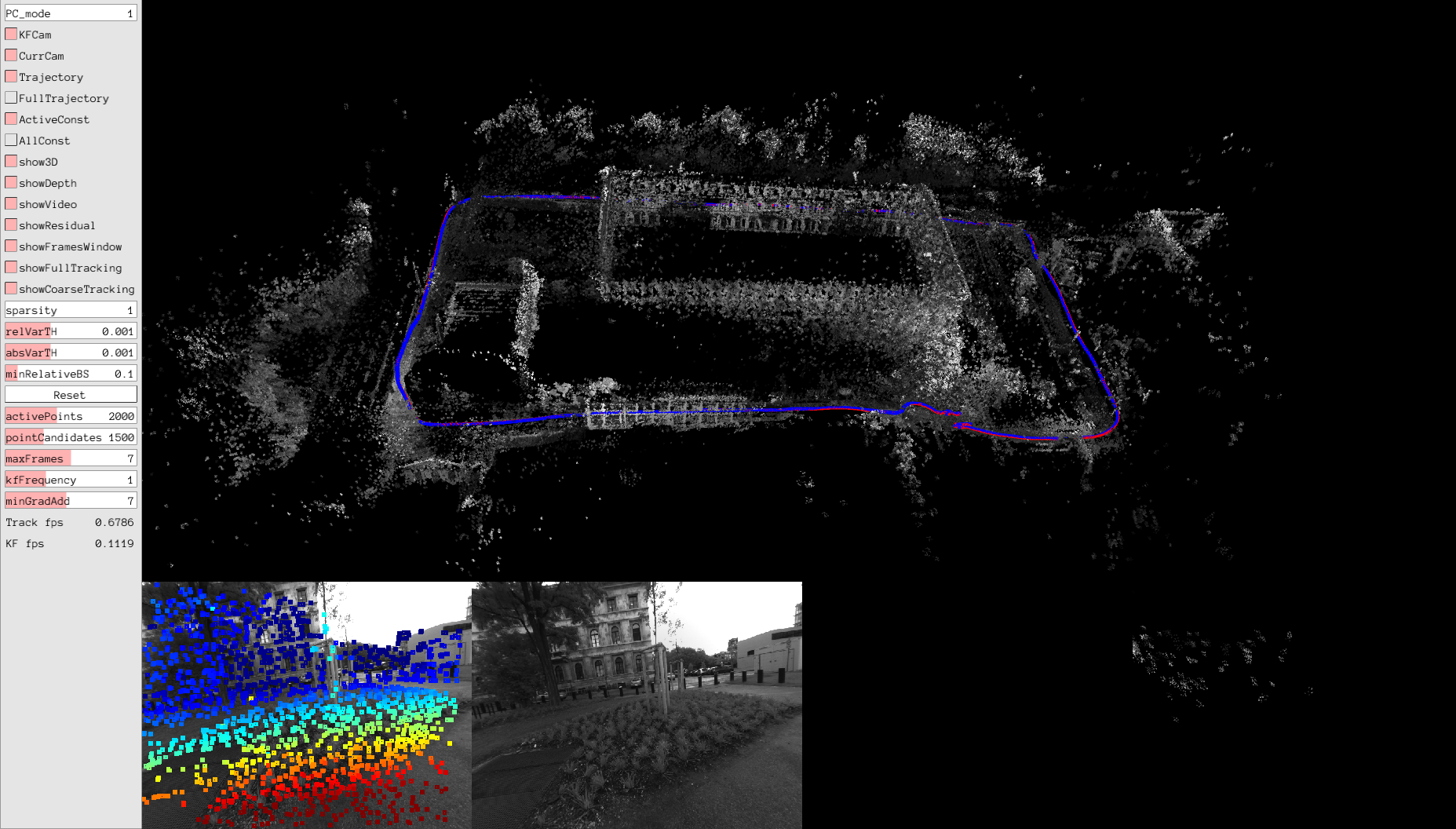
Demo: DSO
(for real)
Feeling