Master Thesis
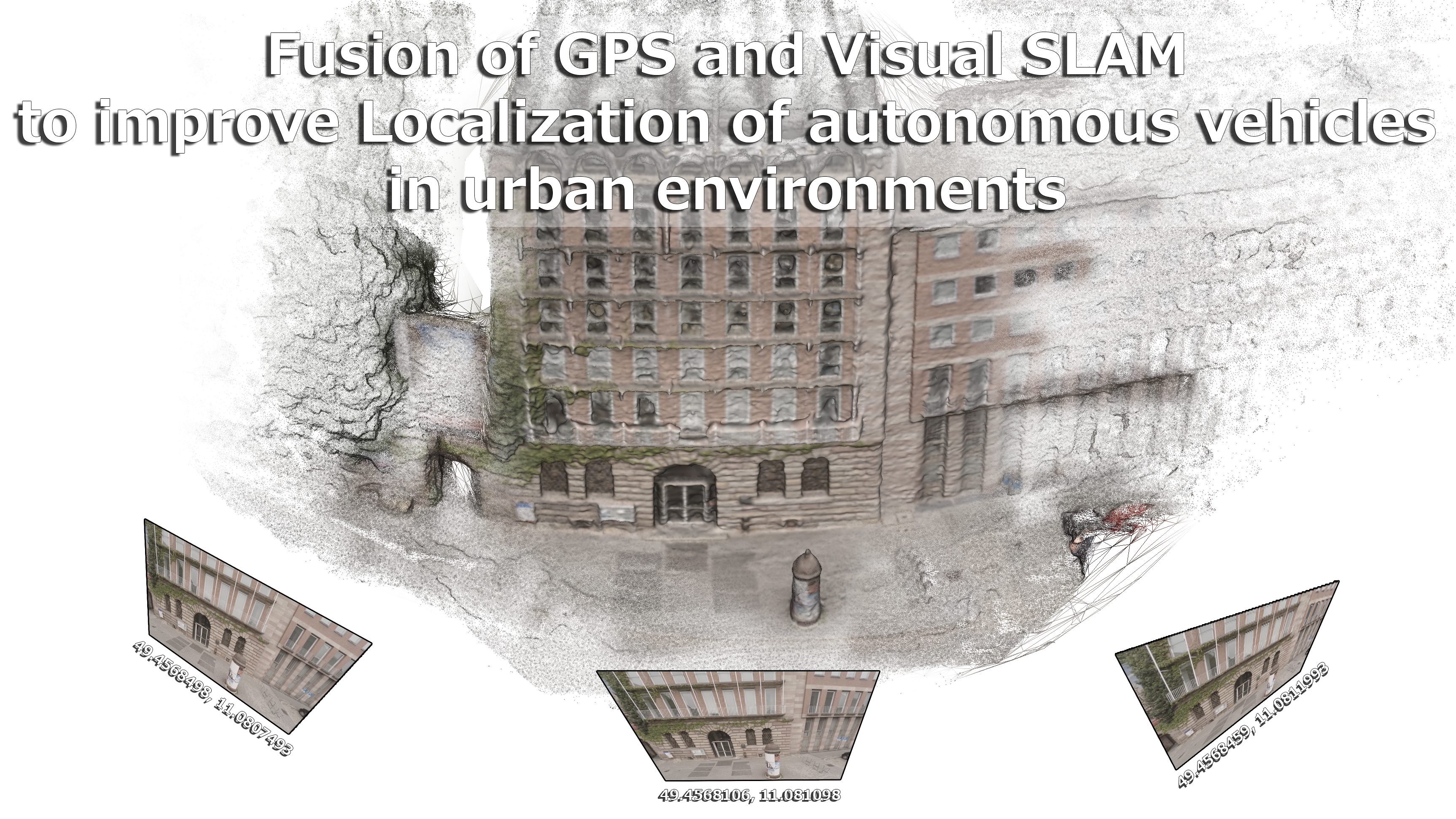
Fusion of GPS and Visual SLAM
to improve Localization of autonomous vehicles
in urban environments.
by Adam Kalisz
Online Documentation: https://Master.Kalisz.co
Agenda
- Introduction
- What is GPS and VSLAM?
- Approaches, State of the art
- Demo: First Tests
- Conclusion
Introduction
- Adam Kalisz
- Born and raised in Nuremberg
- A/V Media Designer (aka cameraman)
- Started 3D Graphics with Cinema 4D R6 CE (2001)
- Media Engineering (Bachelor)
- Computer Science (Master)
- Blender Foundation Certified Trainer
- Assistant professor for CG at the NIT (Ohm)
Global Positioning System (GPS)
Latitude: 49.414465299999996
Longitude: 11.1300984
This is a location in Langwasser, Nuremberg, Bavaria.
How to use in global map? WGS84, UTM31N, ...?!
Visual Simultaneous Localization And Mapping (VSLAM)
Vision-based approach to determine own pose
and to understand scene
Monocular vs. Stereo
Similar to Structure-from-Motion (SfM)
Example
ElasticFusion: Dense SLAM Without A Pose Graph
Mathematical concepts:
Feature Detection and Description
Feature Matching
Epipolar Geometry
Camera Calibration
Depth Estimation
Point Cloud
Bundle Adjustment
Scan Matching
Meshing
Segmentation
Parametrization
Somewhat exotic:
- Featureless
- Curvature Hints from user input
(Baldacci, A., Bernabei, D., Corsini, M. et al. Vis Comput (2016)) - LSD-SLAM: Large-Scale Direct Monocular SLAM
(J. Engel, T. Schöps, D. Cremers, In ECCV (2014))
- Curvature Hints from user input
- Deep Learning
- SfM-Net: Learning of Structure and Motion from Video
(Sudheendra Vijayanarasimhan et al. (2017)) - Unsupervised Learning of 3D Structure from Images
(Google (2016)) - A fully end-to-end deep learning approach for real-time simultaneous 3D reconstruction and material recognition
(Zhao et al. (2017))
- SfM-Net: Learning of Structure and Motion from Video
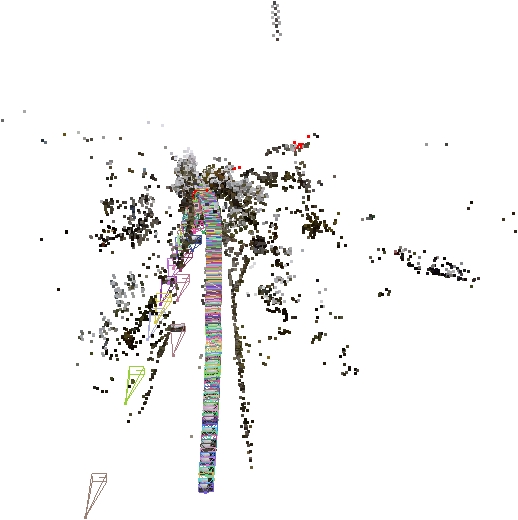
Demo:
First Test:
- Mounted GoPro Hero 4 Black on Car
- HTML5 Sensor Recorder
- HTML5 GPS Track
- Visual SfM for 3D Reconstruction



Conclusion
- GPS signal too noisy, unusable
- What to do with missing GPS data
- Time consuming sparse reconstruction (700 images, 2 nights)